Daha iyi bir doku paketleme algoritmasıyla birkaç ay çalıştım.
Başladığımız algoritma basitti. Tüm girdi öğelerini topla. Bunları tüketilen, büyükten küçüğe toplam piksel sayısına göre sıralayın. Bunları tek bir tarama sırasına göre sıralayın, sadece üst piksel pikselinden üst piksel pikseline kadar test edin, bir çizgiyi aşağı doğru hareket ettirin ve her başarılı yerleştirme işleminden sonra tekrar üst piksel pikseline sıfırlayarak tekrarlayın.
Bunun için bir genişlik kodlamanız veya başka bir sezgisel buluşma bulmanız gerekir. Kareliği korumak için algoritmamız 128'de başlayacak, daha sonra genişliğinden daha derin olmayan bir sonuç ortaya çıkıncaya kadar 128'ler artacaktır.
Böylece bu algoritmaya sahiptik ve onu geliştirmeye karar verdim. Bir sürü tuhaf sezgisellik denedim - birbirine uyan nesneler bulmaya çalıştım, bir miktar istenen uzay paketleme özelliklerine ağırlık vererek, döndürerek ve çevirerek yaptım. Bütün çalışmalarımdan sonra, tam anlamıyla üç aylık çalışma süresinde% 3 yer tasarrufu sağladım.
Evet. % 3.
Sıkıştırma yordamını çalıştırdıktan sonra, aslında daha da büyük oldu (hala açıklayamam), bu yüzden her şeyi attık ve eski algoritmaya geri döndük.
Öğeleri sıralayın, tarama sırasına göre dokuda sıkışın. İşte algoritmanız. Kodlaması kolaydır, çalıştırması hızlıdır ve inanılmaz miktarda çalışma yapmadan çok daha iyi olamayacaksınız. Şirketiniz en az 50 kişi büyük ve muhtemelen daha fazla değilse, bu işe değmez .
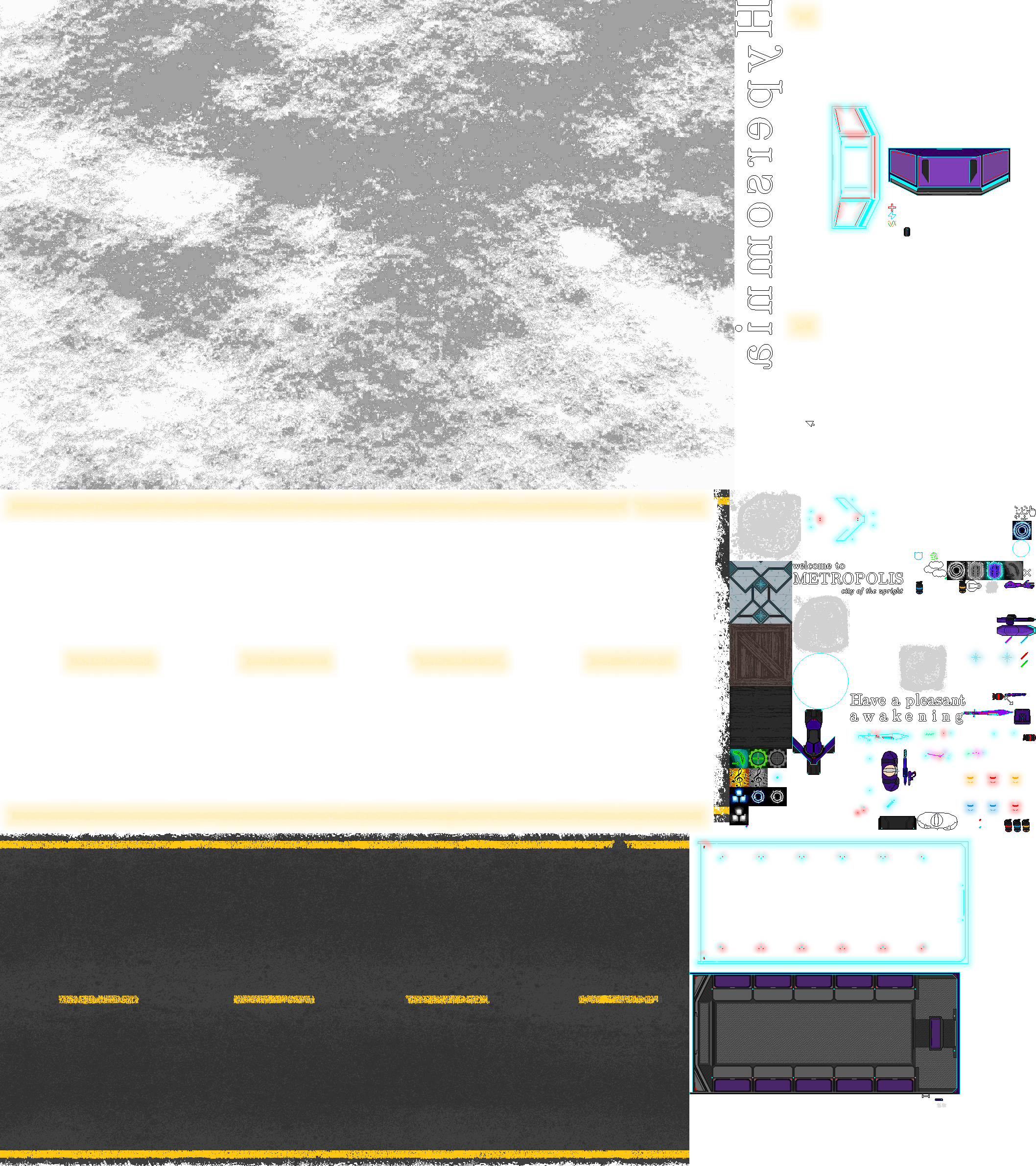
Ve bir yan not olarak, bu algoritmayı (sabit genişlik 512 piksel) tam anlamıyla tam olarak yaptığınız aynı uygulama için uyguladım. Maden, glifler arasındaki fazladan boşluğu da hesaba katan Valve'ın mesafe-alan tabanlı metin işleme algoritmasını kullandığı için bulanık görünüyor . Açıkçası, geride çok fazla boş alan kalmadı ve işleri açık noktalara sıkıştırmak iyi bir iş çıkardı.
Bunun için tüm kod BSD lisanslıdır ve github'da mevcuttur .